ROBOMAXX
Modification pour robotique, étude, Projets ...



SOMMAIRE :
| DEMONTAGE | PLATINE ELECTRONIQUE | CONNECTEURS |
| APRES MODIFICATIONS | AIDE PROGRAMATION E/S etc ... | DataSheet COMPOSANTS |
| SCHEMA STRUCTUREL | PARTIE MECANIQUE | LIENS |
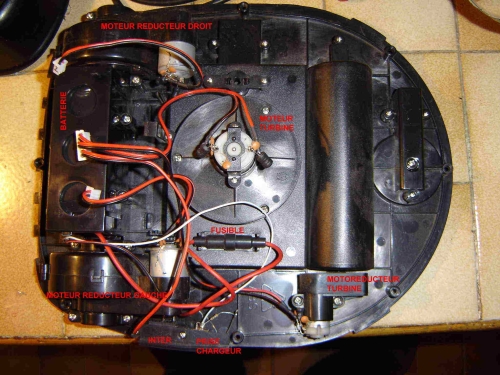
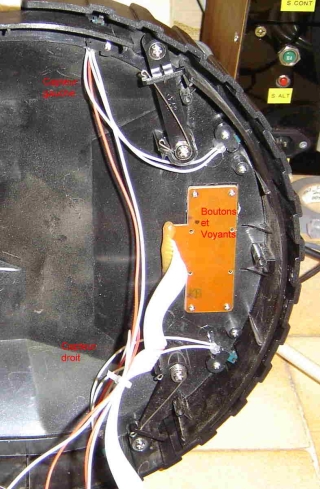
Vue Moteurs et Batterie Vue Capteurs
Platine électronique (démontage sans dessoudage ni vis)
le EM78P156EL OTP
ROM (fiche technique)
non reprogrammable
est compatible (au moins physiquement) et broche à
broche avec le PIC 16F84
Le microcontrôleur d'origine est donc dessoudé et remplacé par un support 18 pins (pas Tulipe)
Le quartz est dessoudé et remplacée par un support
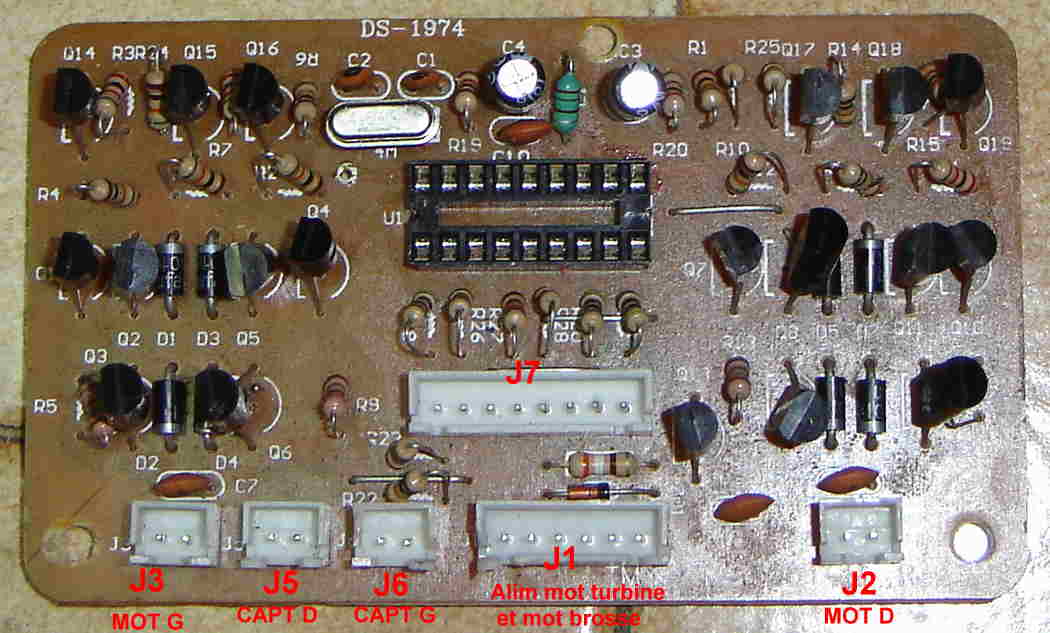
Vue de dessus comme sur la Photo borne 1 des connecteur à Gauche
Vérifier l'implantation des 2 condensateur chimiques sur mon modèle il sont monté à l'envers !
EM78P156EL OTP ROM (fiche technique)
PIC (voir page SIEL05)
transistors : S9012 S9013 C2328 A928
J1:
| Masse (-) |
+BAT (6V) |
MotBrosse- (Masse) | MotBrosse+ (+BAT) | MotTurbine- (Masse) | Motturbine (+BAT) |
| 1 | 2 | 3 | 4 | 5 | 6 |
J7 :
| Voyant B | Bouton A | Voyant B | Bouton B | Bouton C | Voyant C | Commun Boutons (Masse) | +Vcc (5V) |
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
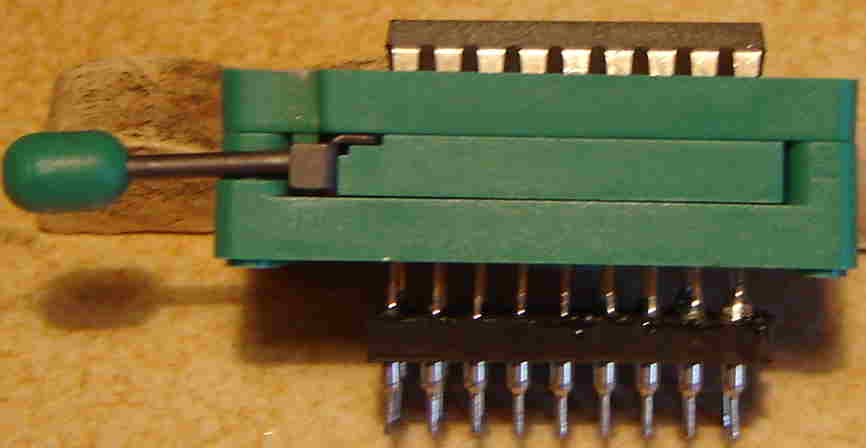
Le pic sera monté sur un support à force d'insertion nulle
lui même soudé sur un support tulipe 18 Broches :
L'ensemble remonté (tous les fils d'origine sont assez long)

Les Bornes diamètre 4 proviennent du +Bat après interrupteur et du - Bat (Masse)
elle permettent :
une mesure de la tension batterie
la connexion - d'un multimètre ou d'un scope
La connexion d'une alimentation alimentation externe (dans ce cas bien placer l'interrupteur sur OFF)
| Les 3 Bp et le 3 voyants peuvent etre supprimés et remplacés par d'autres entrées ou sorties |
| il suffit d'ôter le connecteur J7 et de le remplacer par un connecteur issu d'une autre platine ? |
| ( attention il faudra toujours apporter sur J7 en pin 1 le - Bat (masse) et en pin 2 le + Bat) |
en cours de réalisation
brouillon terminé mis à vérifier ici : schema (PDF)
AIDE POUR PROGRAMMATION (FLOWCODE V3 démo):
| LISTES DES ENTREE / SORTIES | ||||
| E/S | PORT | BIT DU PORT | N° Broche µP | |
| MOTEUR BROSSE | DIRECT 6V +BAT | DIRECT 6V +BAT | DIRECT 6V +BAT | |
| MOTEUR TURBINE | DIRECT 6V +BAT | DIRECT 6V +BAT | DIRECT 6V +BAT | |
| MOTEUR DROIT Cmd AR | S | B | PB6 | 12 |
| MOTEUR DROIT Cmd AV | S | B | PB7 | 13 |
| MOTEUR GAUCHE Cmd AR | S | B | PB4 | 10 |
| MOTEUR GAUCHE Cmd AV | S | B | PB5 | 11 |
| VOYANT A | S | B | PB1 | 7 |
| VOYANT B | S | B | PB2 | 8 |
| VOYANT C | S | B | PB3 | 9 |
| CAPTEUR AV DROIT | E | A | PA1 | 18 |
| CAPTEUR AV GAUCHE | E | A | PA0 | 17 |
| BOUTON POUSSOIR A | E | A | PA2 | 1 |
| BOUTON POUSSOIR B | E | A | PA3 | 2 |
| BOUTON POUSSOIR C | E | B | PB0 | 6 |
| PA4 (broche 3 du µP) non utilisé don disponible | ||||
| Les 3 Bp et le 3 voyants peuvent être supprimés et remplacés par d'autres entrées ou sorties | ||||
| il suffit d'oter le connecteur J7 et de le remplacer par un connecteur issu d'une autre platine ? | ||||
| ( attention il faudra toujour apporter sur J7 pin 1 le - Bat (masse) et sur J7 pin 2 le + Bat) | ||||
| VARIABLES DE COMMANDE | |||
| Nom dans FlowCode | Hexa | Bin | Dec |
| AVANCER | 0x5F | ||
| TOURNERDROITEAV | 0xDF | ||
| TOURNEGAUCHEAR | 0xBF | ||
| TOURNERGAUCHEAV | 0x7F | ||
| TOURNEDROITEAR | 0xEF | ||
| RECULER | 0xAF | ||
| ARRETDEPLACEMENT | 0xFF | ||
| Attention toute les entrées/sorties sont à considérer en logique négative | |||||||||||
| Vous pouvez utiliser les valeur hexa dans flowcode (Utiliser Port B complet mais | |||||||||||
| placer les croix de masque en face des bits concernés) | |||||||||||
| B1 | B2 | B3 | |||||||||
| Voyant C allumé | 1 | 1 | 0 | 0x6 | |||||||
| Voyant C allumé | 1 | 0 | 1 | 0xA | |||||||
| Voyant C allumé | 0 | 1 | 1 | 0xC | |||||||
| B7 | B6 | B5 | B4 | B3 | B2 | B1 | B0 | ||||
| AVANCER | 0 | 1 | 0 | 1 | 1 | 1 | 1 | 1 | 0x5F | ||
| TOURNERDROITEAV | 1 | 1 | 0 | 1 | 1 | 1 | 1 | 1 | 0xDF | ||
| TOURNEGAUCHEAR | 1 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 0xBF | ||
| TOURNERGAUCHEAV | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0x7F | ||
| TOURNEDROITEAR | 1 | 1 | 1 | 0 | 1 | 1 | 1 | 1 | 0xEF | ||
| RECULER | 1 | 0 | 1 | 0 | 1 | 1 | 1 | 1 | 0xAF | ||
| ARRETDEPLACEMENT | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0xFF | ||
| attention (pont en H) jamais : | |||||||||||
| B6 et B7 simultanément | |||||||||||
| B4 et B5 simultanément | |||||||||||
| A2 | A3 | B0 | |||||||||
| Appui sur Bp A | 0 | 1 | 1 | ||||||||
| Appui sur Bp B | 1 | 0 | 1 | ||||||||
| Appui sur Bp C | 1 | 1 | 0 | ||||||||
| A1 | A0 | ||||||||||
| Capteur Gauche activé | 1 | 0 | |||||||||
| Capteur droit activé | 0 | 1 | |||||||||
| Les 2 activés | 0 | 0 | |||||||||
PROGRAMME DE TEST DU ROBOMAXX
PIC 16F84A 4MHZ
fichier HEX : maxxtest.hex
fichier flowcode :
il permet de vérifier les différents composants du robot :
Mise en marche
Un appui sur le BPA allume le voyant A
Un appui sur le BPA allume le voyant B
Un appui sur le BPC allume le voyant C
Le Robomaxx avance (2s)
Recule (2s)
Toune a droite AV (2s)
Tourne à Gauche AV(2s)
Recule AR en tournant à droite
Recule AR en tournant à Gauche
Arret des mouvement
Une action sur capteur Gauche allume un voyant
Une action simultanée sur les 2 capteurs allume les 3 voyants durant (3 s)
FIN DES TEST
voir ce lien (Fichier zip de 11 MO) http://stisi.ac-aix-marseille.fr/ressources/isi/robomax.zip
http://www.hyla-online.de/ suite
http://robotikportal.de/phpBB2/viewtopic.php?t=1475&start=0
http://www.robotikportal.de/phpBB2/viewtopic.php?t=1475&sid=239d755fb60900fb99268d925d566dcb
Plan 3D et vidéo sur http://stisi.ac-aix-marseille.fr/ressources/isi/robomax.zip (zip de 11Mo)
Visaliseur gratuit de fichiers SolideWORKS :
http://www.solidworks.com/pages/programs/eDrawings/e2_register.html